Some projects from my master's program, and earlier
FRICTIONLESS SURFACE MOBILE ROBOT AND LASER-BASED LOCALIZATION

PROTOTYPING NUDGING HEADPHONES

OPTIMAL CONTROL OF KINEMATIC CAR MOTION
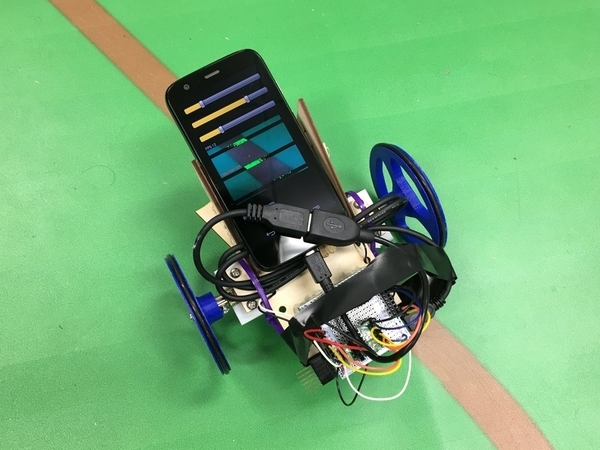
ANDROID LINE FOLLOWER MOBILE ROBOT

INTUITIVE ROBOT TELEOPERATION
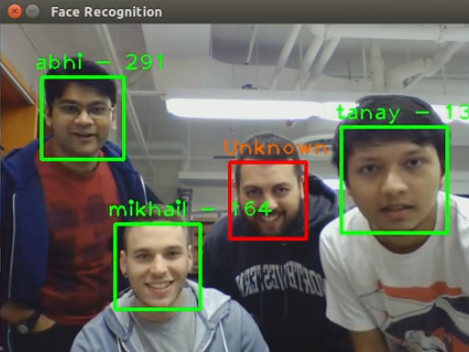
REAL-TIME FACE RECOGNITION (EIGENFACES AND FISHERFACES)
COMPUTER VISION TECHNIQUES

VISUAL SERVOING TO SORT OBJECTS WITH BAXTER USING ROS
NONLINEAR DYNAMICS OF THE TUMBLING TOY AND MORE
A PYTHON LIBRARY FOR ROBOTIC MANIPULATION

MACHINE LEARNING EXERCISES

STAIR CLIMBING WITH LOWER-LIMB WEARABLE ROBOTS
DEVELOPMENT OF A ROTARY SERIES ELASTIC ACTUATOR

RETHINKING DIAGNOSTICS WITH MIT MEDIA LAB
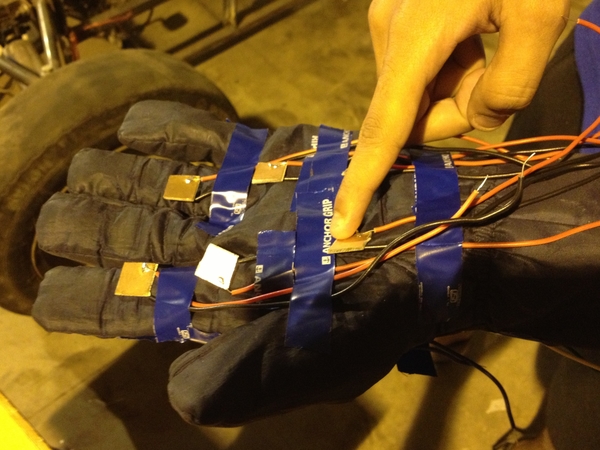
TACTILE BRAILLE GLOVE FOR THE DEAFBLIND