
Development of a Series Elastic Actuator for Robotic Applications
In the summer of 2014, I worked at the Mechatronics Design Lab under the Cyber-Physical Systems Innovation Hub at IIT Hyderabad. There I designed, fabricated and tested a rotary Series Elastic Actuator (SEA), based on the design of Eduardo Torres-Jara and Jessica Banks. Advisor: Prof. R. Prasanth Kumar, Associate Professor, Dept. of Mechanical and Aerospace Engineering.
Overview
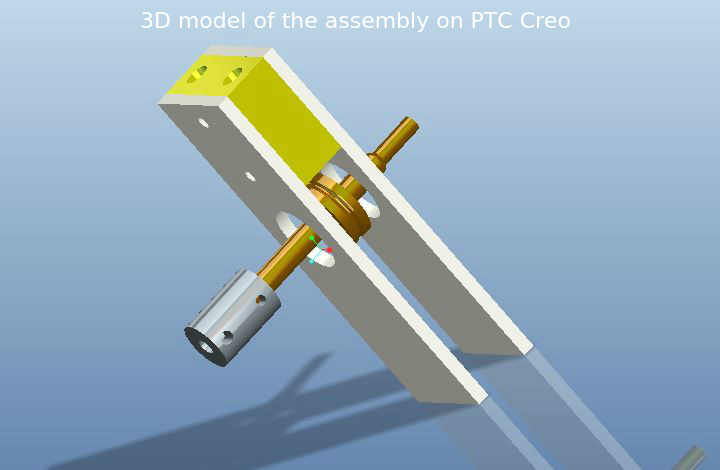
- Reviewed existing SEA designs and theory, created 3D models of components with simplicity, scalability and low cost in mind
- Acquired components and fabricated parts using 3D printing as well as conventional machining
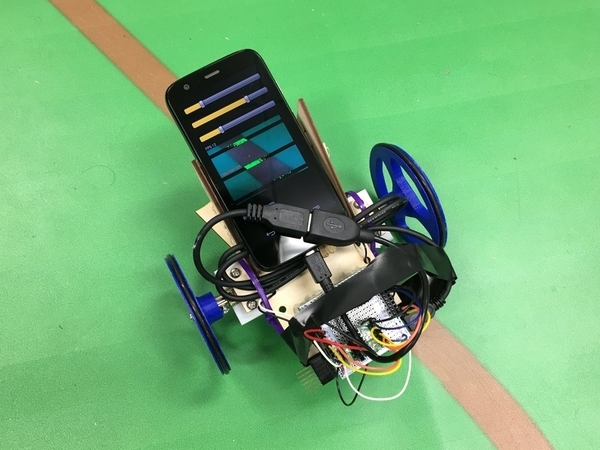
- Integrated the hardware, software and electronics modules to create a working prototype
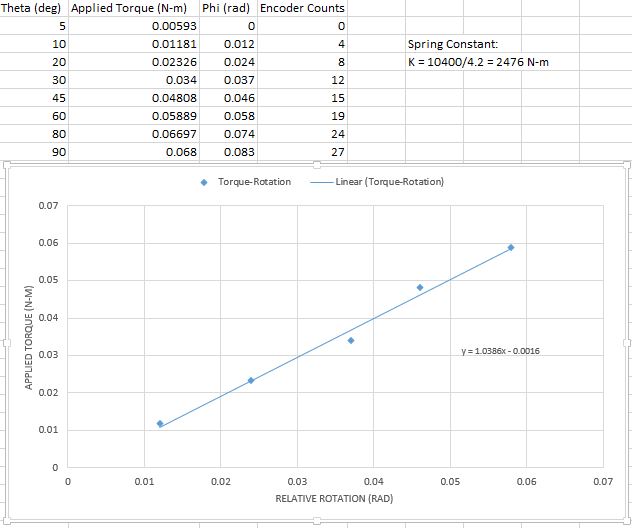
- Performed various experiments (force sensing, manual homing, torque control, spring stiffness measurement) and achieved desirable results
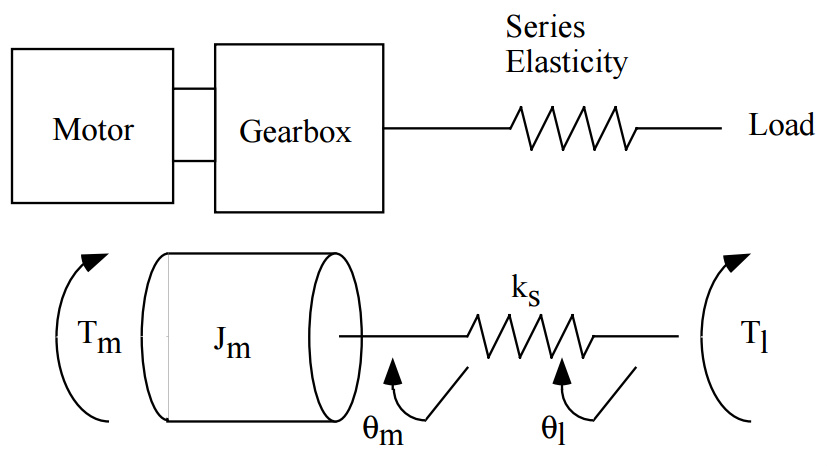
- Incorporating a spring element in the motor actuator design simplifies the force control problem into that of position control, which is easy to achieve with just an encoder
- SEA also enhances safety, compliance and adaptability over traditional stiff actuators, which could enable more natural interaction with humans
Project Dependencies:
![]()